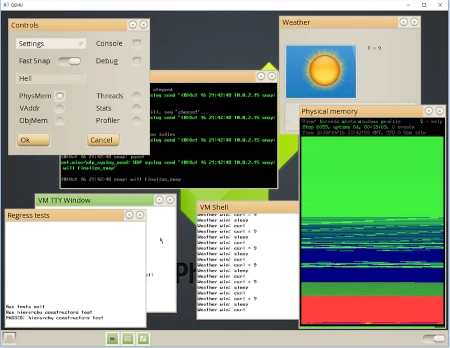
QuickOS
Web site: quickos.sourceforge.net Origin: unknown Category: RTOS Desktop environment: CLI Architecture: x86 Based on: unknown Wikipedia: Media: Install The last version | Released: 2001 QuickOS – a really-quick-realtime-multitasking-os (arqrmos), that requires less than a second to boot up. Basic-kernel-functions will be written with NASM assembler. It is open-source operating system, released under the GNU GPL … Read more